2020-03-15 go webassembly experiments をローカルPCで動かす [長年日記]
go webassembly experiments をローカルPCで動かす
-
2020/03/14
- 背景
-
■これからは「C/C++ → Go」と「JavaScript → Webassembly」とシフトしながら色々やっていこうと思っている
■正直、どっちも難しい。そういう時は、サンプルをパクって勉強するのが正解 ―― と思っている
-
- 目的
-
■取り敢えず、https://github.com/stdiopt/gowasm-experiments にある、 https://stdiopt.github.io/gowasm-experiments/bouncy/ をローカルで動かせるようになろう、と考えた
-
- 環境
- ■Windows7 or 10
- ■Go と python3 をインストールしてある
- やってみたこと
- ■サンプルプログラムをダウンロードして、コンパイルしてみた
- ~ https://github.com/stdiopt/gowasm-experiments/tree/master/bouncy
- コマンドプロンプトからこんな感じでコンパイルできた
- $ set GOOS=js
- $ set GOARCH=wasm
- $ go build -o main.wasm main.go
- ちなみに、bashの環境があれば、build.shでコンパイルできる
- 実際には、コンパイルしなくても、バイナリコード(main.wasm)も、ダウンロードの中に入っているので、コンパイルは不要だったが
- ■ローカルサーバとしては、色々試してみた
- python3 -m http.server 8080
- Goでサーバも作ってみた
- Perlでもやってみた
- ■動画がどうしても出てこない
- ■ここから丸2日間の格闘のスタート
- もう、色々探しまくった
- ■サンプルプログラムをダウンロードして、コンパイルしてみた
- 確認していた問題点
- ■Google Chromoから、→ 「その他のツール」 → 「ディベロッパーツール」 →
Uncaught (in promise) TypeError: Failed to execute 'compile' on 'WebAssembly': Incorrect response MIME type. Expected 'application/wasm'.
この「Expected 'application/wasm'.」がどうにも、不味いらしい ―― が、解決方法が、どうにも見つからない
- ■kobore.netのサーバに上げても、改善が見られず
- ■Google Chromoから、→ 「その他のツール」 → 「ディベロッパーツール」 →
- ローカルサーバを作ってみた
- ■httpsrv.pyを作った
#!/usr/bin/env python3 import http.server import socketserver PORT = 8080 Handler = http.server.SimpleHTTPRequestHandler Handler.extensions_map.update({ '.wasm': 'application/wasm', }) socketserver.TCPServer.allow_reuse_address = True with socketserver.TCPServer(("", PORT), Handler) as httpd: httpd.allow_reuse_address = True print("serving at port", PORT) httpd.serve_forever()
- ■httpsrv.pyを作った
- ■httpsrv.pyを起動した
- $ python3 httpsrv.py
- http://localhost:8080 で起動
-
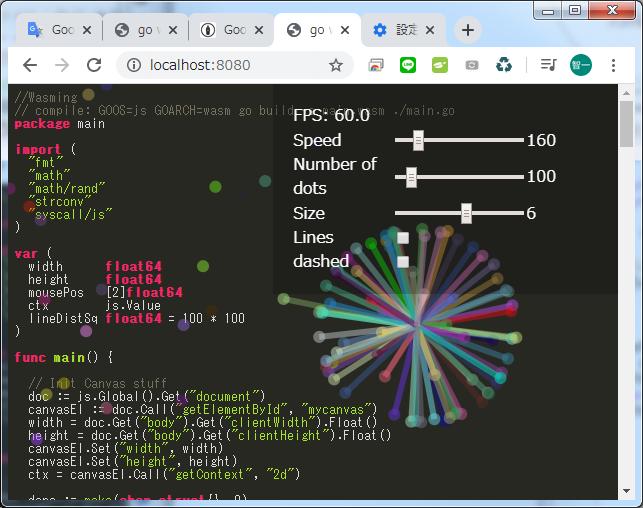
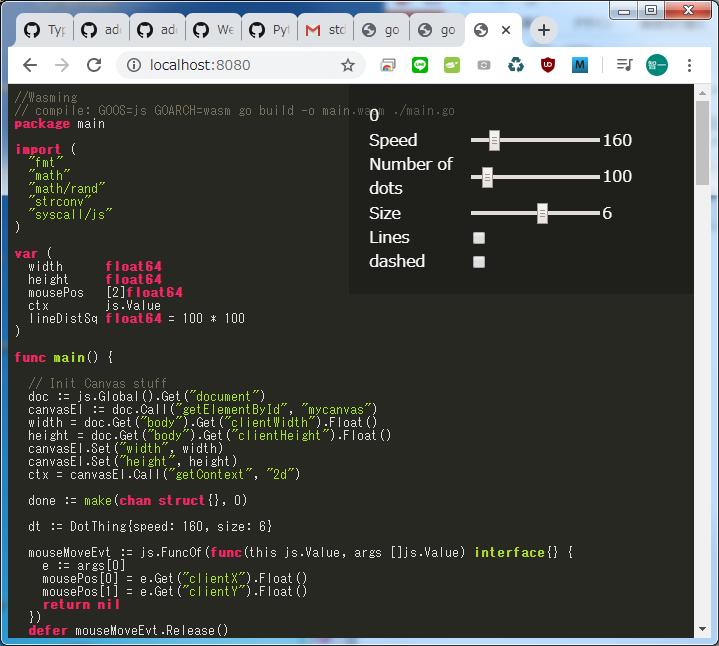
■動いた
■動かなかったら、chromo → 「設定」 → 「閲覧履歴データの削除」でキャッシュをクリアてみること
■Windows10の環境では、独自につくったmain.wasmを動かすと、Uncaught (in promise) LinkError: WebAssembly Instantiation: Import #1 module="go" function="runtime.scheduleCallback" error: function import requires a callable というエラーが出てくることがある。この場合は、Windows10のGoの環境にあるwasm_exec.jsをパクってくる。私の場合は、C:\Go\misc\wasm にあったので、そこから取ってきた。
-
以上